Device Manager
PingViewer automatically scans for available devices on serial ports (COM) and UDP connections. If a Ping device is detected, the available connection is shown and the user will be able to choose between all available devices in Device Manager.
PingViewer attempts to connect to UDP ports 9090 (Ping1D devices) and 9092 (Ping360 devices) on the host at IP address 192.168.2.2. This is the default IP address of the onboard computer that runs on the BlueROV2. The onboard computer automatically configures a communication bridge on these ports to a connected sensor.
Device Manager
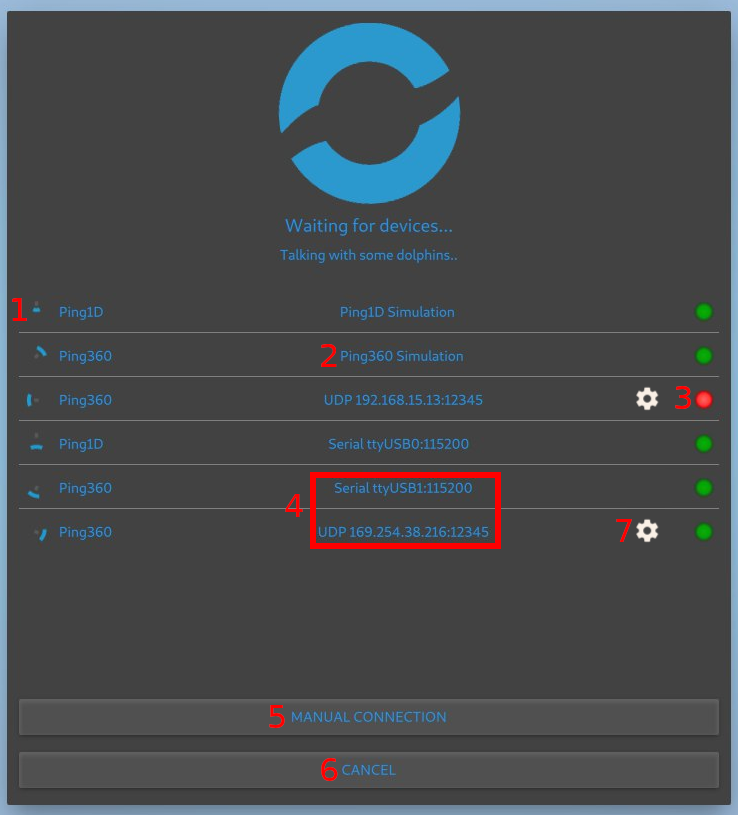
- Shows an animation and the name of the available sensor.
- Describes the kind of the available connection.
- Shows the availability of the connection.
Red: The connection is not available/reliable.
Green: The sensor is connected and available for connection. - Describes the connection type and the connection configuration.
- Allows the user to go to Manual Connection.
- Cancel and exit Device Manager.
- Opens Ping360 Ethernet Configuration painel.
Manual Connection
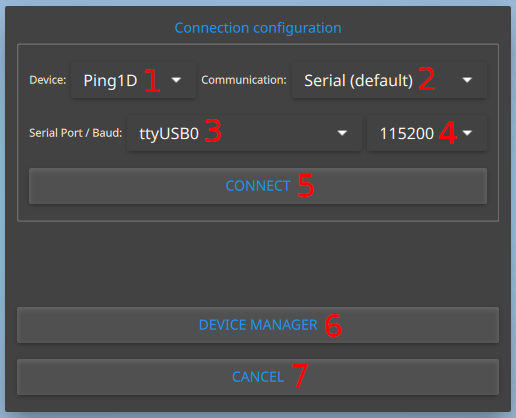
- Displays all devices compatible.
- Shows available connection types.
- Lists all available serial ports.
- Displays the valid baud rates for the selected device.
Note: If the device uses Automatic Baud Rate detection, the baud rate list will not appear.
- Connects with the configured settings.
- Goes back to Device Manager menu.
- Cancel and exit Manual Connection.
Connection Types
- Serial: Select the serial port (eg.
COM1orttyUSB0) and baudrate, that will be updated by the possible baud rates for the sensor. - UDP: Select the host UDP server IP address and port.
Note: To connect the application to a Ping device on a remote host (eg. a Raspberry Pi) you can use the pingproxy program in the bluerobotics-ping python package:
pip install --user bluerobotics-ping
python -m brping/pingproxy --device <device>
<device>is the serial port where the Ping device is connected (eg./dev/ttyUSB0).
Ping360 Ethernet Configuration
Allows ethernet mode type as DHCP Client or static IP. When using static IP, be sure to set an IP address that exists under your configured subnet.
This configuration is only for users that have a custom network environment, such option is not supported fully.